A Agência Japonesa de Exploração Aeroespacial (JAXA), em parceria com instituições acadêmicas e empresas privadas, conduziu uma missão lunar que levou à superfície do satélite natural o robô transformável SORA-Q, um dispositivo de aproximadamente 8 centímetros. O equipamento foi transportado pela missão SLIM (Smart Lander for Investigating Moon), que pousou em 19 de janeiro de 2024, após lançamento em dezembro de 2023.
Características do robô e parceria
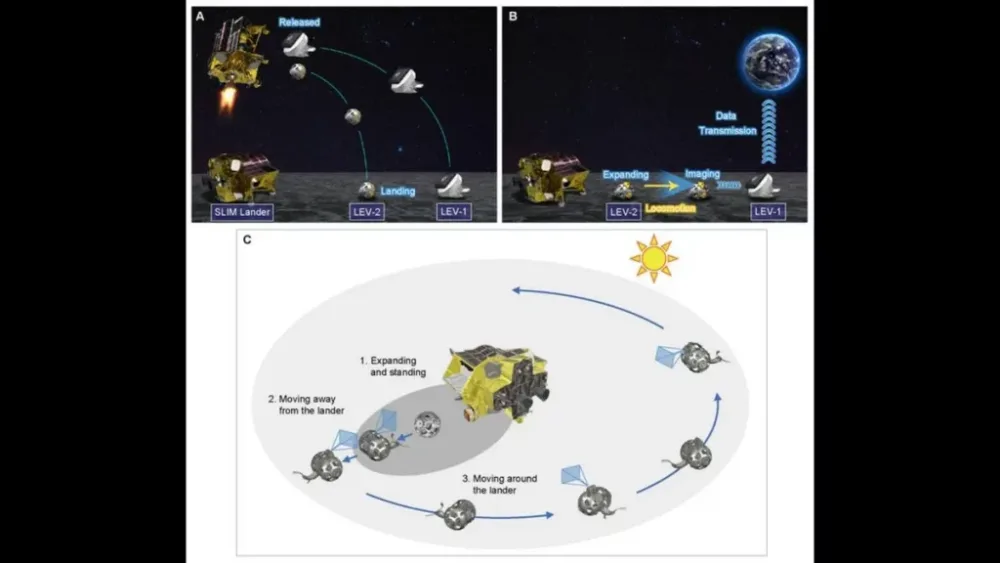
O SORA-Q foi projetado para alterar sua forma ao tocar o solo lunar: de uma configuração esférica passa a assumir um formato cilíndrico funcional. As metades da esfera servem como rodas, enquanto uma câmera se projeta para observação do ambiente e uma peça traseira atua como estabilizador durante o deslocamento. O desenvolvimento do robô contou com a colaboração de JAXA, Sony, Universidade Doshisha e a empresa Takara-Tomy, conhecida pelo setor de brinquedos e por sua experiência em conceitos de transformação robótica.

Operação e objetivos da missão
Durante a operação, o SORA-Q atuou em conjunto com outro sistema robótico auxiliar, responsável por retransmitir informações para a Terra. A comunicação entre os robôs permitiu o envio de dados mesmo sem contato direto com a base terrestre. O objetivo central foi testar a navegação autônoma em ambiente lunar e a comunicação em cadeia a partir da superfície até a Terra. A navegação baseou-se em imagens captadas no solo lunar, permitindo que o sistema identificasse obstáculos naturais como crateras e irregularidades do terreno, reduzindo a dependência de comandos diretos enviados da Terra.
A missão ocorreu em uma região próxima ao local de pouso do SLIM, dentro do hemisfério lunar visível, em uma área geológica marcada pela cratera Shioli, localizada dentro da cratera Cyrillus, na região de Mare Nectaris.
Duração e interrupção da operação
A operação do robô teve duração limitada, encerrando-se aproximadamente 100 minutos após o início das atividades no solo lunar. O término ocorreu antes do tempo estimado, possivelmente devido a falha de bateria ou danos associados ao sistema auxiliar de deslocamento.
Resultados publicados em estudo científico
A pesquisa que deu origem ao projeto foi publicada recentemente na revista Science Robotics. O estudo detalha os resultados da demonstração, que incluem:

- Mobilidade autônoma em escala reduzida na superfície lunar, com o robô sendo capaz de se deslocar ao redor do módulo SLIM;
- Captura de imagens do ambiente lunar;
- Transmissão de dados por comunicação sem fio entre os robôs e para a Terra;
- Operação autônoma sem controle remoto proveniente da Terra.
Esses resultados demonstram a viabilidade de sistemas robóticos pequenos e transformáveis para exploração lunar futura, abrindo caminho para missões com menor dependência de infraestrutura terrestre.